Campus News
Instrumentation grant will establish UCSC hybrid robotic systems experimental testbed
A $275K instrumentation funding award from the Defense University Research Instrumentation Program will support a multi-university project to create a hybrid robotics system test environment to run verification and validation testing on autonomous systems.

A group of researchers from the UC Santa Cruz Baskin School of Engineering, the University of Wisconsin-Madison, and the University of Michigan have received a $275,000 instrumentation grant from the Defense University Research Instrumentation Program (DURIP) to create a more efficient testing system for autonomous systems through the use of hybrid robotics.
Autonomous systems, such as drones, self-driving vehicles, and walking robots, are designed to achieve a set of goals in changing environments without human intervention.
Conventional autonomous system design processes involve separate stages for product design, testing, validation, and risk assessment, with distinct simulation, fabrication, and synthesis tools used at each stage. If failures arise in a later phase, then the process must restart at phase one, greatly increasing time between testing and verification.
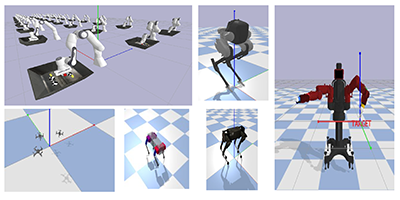
The multi-university project titled “Verification and Validation of Autonomous Systems with Hybrid Dynamics under Uncertainty,” led by Ricardo Sanfelice, principal investigator and professor of electrical and computer engineering at UCSC, seeks to streamline and accelerate the verification and validation process through a Physical Design Optimization (PDO) paradigm that combines all phases of testing into one setting for autonomous system development. With the assistance of various robotic devices, this paradigm rapidly prototypes the autonomous system’s design, validates its fabrication, and quantifies both its performance and its failure risk by conducting physical tests.
The instrumentation funding, which will be administered by the Air Force Office of Scientific Research (AFOSR), will provide the necessary equipment—3D rendering and manufacturing machines, manipulators, ground robots, aerial robots, and vehicle robots—for the researchers to test their design paradigm theory.
“The production of a physical robot is one aspect of the design loop and often the most time-consuming,” said UCSC electrical and computer engineering postdoc Adeel Akhtar, who has been working closely with the researchers on this project. “With the new machinery, we’ll be able to minimize human participation in that loop, accelerating the overall process.”
The manufacturing and testing equipment will establish a state-of-the-art testing facility, located within the UCSC Hybrid Systems Laboratory (HSL). Different types of robotic devices will work together in the space for real-time manufacturing, experimental testing, and remanufacturing of autonomous systems. The testbed, which will be called the Hybrid Robotics Arena, will provide researchers the opportunity to catch critical failures without having to restart the entire validation process, and remanufacture and reprogram the systems for optimal performance.
“It’s very exciting to see this funding come through,” said Sanfelice, who leads the HSL and is the Cyber-Physical Systems Research Center (CPSRC) director at UCSC. “It’s going to allow us to build this new concept of manufacturing, testing, and re-manufacturing in an experimental testbed, and allow for multi-robot cooperation to build and assemble, and essentially run a system.”
Additionally, the Hybrid Robotics Arena will be a space for future collaborations across UCSC.
“Once this project ends, the instrumentation will remain at UCSC,” Sanfelice said. “I envision this being a very exciting addition to our robotics engineering program, which will help attract new students and researchers. It not only allows us to validate our theory in the short term, but also provides exciting opportunities for future robotics and control research.”
Akhtar added that this facility will provide undergraduates and graduates valuable hands-on robotics research opportunities, preparing them for industry.
The new testing environment’s computer interface will also permit remote testing and reprogramming, welcoming the opportunity for cross-university research collaborations.
The “Verification and Validation of Autonomous Systems with Hybrid Dynamics under Uncertainty” proposal was supported in part by the Cyber-Physical Systems Research Center. Co-principal investigators on the project include Daniele Venturi, professor of applied mathematics at UC Santa Cruz; Michael Wehner, assistant professor of mechanical engineering at the University of Wisconsin-Madison; and Shai Revzen, associate professor of electrical and computer engineering at the University of Michigan.