Campus News
Robotics project aims to develop systems for human-robot collaboration
$3.5 million NSF-funded project will use open-source robotic surgery platform developed at UCSC and UW.
Robots are able to do certain tasks much better than humans, but one thing they’re not good at is collaboration. A new project funded by a $3.5 million grant from the National Science Foundation (NSF) aims to develop human-robot collaborative systems for jobs that are hard for people, but can’t be done by autonomous robots alone.
A primary goal of the project is to advance the state of robotic surgery, which is currently limited in many cases to one robotic system controlled by a single surgeon. Jacob Rosen, a medical robotics expert at UC Santa Cruz and co-principal investigator in the project, said human-robot collaborative systems could have a wide range of industrial applications as well.
“Algorithms developed for surgery can be generalized for applications in industry, and industry applications might be easier targets because surgery is such a complex task,” said Rosen, a professor of computer engineering in the Baskin School of Engineering at UC Santa Cruz.
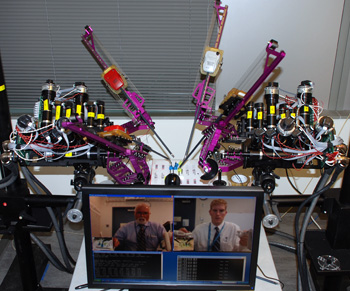
The project takes advantage of the open-source Raven II robotic surgery platform, which the Bionics Lab at UCSC, led by Rosen, developed with researchers at the University of Washington (UW). With funding from an earlier NSF grant, they built seven copies of the Raven II for distribution to top medical research labs. Several of those labs–at UW, Johns Hopkins University, and UC Berkeley–are involved in the new project. A new Raven II system will be built for lead investigator Allison Okamura’s lab at Stanford University.
Surgery historically has been a collaborative effort involving two or more surgeons and assistants working together. “Surgery is such a demanding task, both from a motor-control perspective and in the decision-making required, that it is very difficult for a single individual to conduct,” Rosen said. “With robotic surgery, however, this collaborative model has been interrupted, because the surgical robot is a single entity controlled by a single surgeon. This project is all about regaining the collaboration that surgeons used to do, given the presence of surgical robots in the operating room.”
Different modes of collaboration are possible, such as two robotic devices controlled by two surgeons, or one system controlled by a surgeon and another functioning autonomously. Certain surgical tasks that require repetitive motions, such as suturing, dissection, or retraction, might be fully or partly automated. “People are very good at decision-making, but they get tired easily by doing repetitive tasks. So one goal is to move people back to a decision-making role instead of doing the tedious processes that can potentially be automated,” Rosen said.
The project will approach this problem not only at the robot level, but also by developing a higher-level framework for analyzing the whole process, including the roles and interactions of both humans and robots. “Our research suggests that surgery is like a language,” Rosen said. “The words of this language are defined by various types of tissue interactions, and the pronunciation of the words relates to the magnitudes of the forces, torques, and velocities applied to the tissues. Understanding and characterizing the grammar of the surgical language will allow us to deconstruct surgical tasks into their fundamental elements and, to some extent, automate them.”
In working to develop a new framework for human-robot collaboration, the project will focus on two real-world applications. One is robot-assisted surgery with two robotic devices involved in the same procedure, such as complex suturing procedures. The other is a manufacturing process involving the wiring harnesses for aircraft, in which a specific tying operation is repeated hundreds of times.
In both the manufacturing and medical procedures, the researchers will seek to enhance communication between the human and robot partners. “It’s hard to get robots and people to work together, and it’s even harder to get multiple people and multiple robots to work together,” said Okamura. “A main focus of our project is to get robots to try to understand what people are doing and be able to step in when necessary.”
Rosen noted that the robotics researchers have gained a lot of appreciation for surgeons and for the complexity and demanding nature of the work they do. “We are very humble in our attempts to progress the state of the art, improve outcomes, and contribute to human health,” he said.
Along with Rosen and Okamura, the co-investigators on the project are Blake Hannaford at UW; Pieter Abbeel and Ken Goldberg at UC Berkeley; and Gregory Hager at Johns Hopkins University.